
Industrial Controller
All product are in stock,guaranteed delivery within 3-7 days.


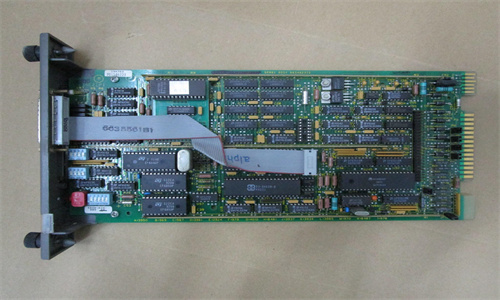
IMSPM01 BAILEY
For simple components, this setting is used to incorporate the horizontal value of the measured parameter, above or below which the starting state is established. In more complex components, a set of tuning values may need to be provided to determine the range of the measured parameters, which will cause the component to start< Strong>Start delay setting : This constant is used to set the startup delay between the startup and operation output states< Strong>Reset Delay Setting: This constant is used to set the delay between the operation output state and the return logic zero


Lockout Settings : The default value for all operands output by the comparator is either logical or; The flag is not set;. All comparators will enter the testing state after the running input is set to logic 1. If at any time the RUN input is changed to logic 0, the comparator will return to its default state. The running input is used to check the comparator. Lockout input is one of the inputs for operation control
AVAL DATA AVME-115B VME YASKAWA SGMP-02AW12 200W 200V 2.0A AC SERVO MOTOR CNC MITSUBISHI Melsec A1SJ71AT21B Data Link free ship Teli CS8420i MACHINE VISION CAMERA PARKER COMPUMOTOR ZETA4 DRIVE CONTROLLER Mitsubishi Melsec A1SD75P3-S3 Positioning Uni Free Ship Motorola MVME 147-023 CPU BOARD Mitsubishi Melsec FX2N-4AD PLC Analog module Mitsubishi Melsec FX2N-32CCL CC-LINK CARD OMRON SYSMAC PLC CQM1-TC101 Temperature Control Unit GE Fanuc PLC VersaMax IC200MDD845D


 TEL: Grace +86 13600179521
TEL: Grace +86 13600179521  Mail: info@hongkongeasy.com jilineasyyi@outlook.com
Mail: info@hongkongeasy.com jilineasyyi@outlook.com Q Q:615739355
Q Q:615739355 ADDRESS:Unit 12, 20th Floor, Good View Commercial Centre, 2-16 Garden Street, Mong Kok, Hong Kong
ADDRESS:Unit 12, 20th Floor, Good View Commercial Centre, 2-16 Garden Street, Mong Kok, Hong Kong whats app
whats app





